ฝากข้อความ
Dolycon นำเสนอระบบสนับสนุนที่ครอบคลุมเพื่อช่วยให้ลูกค้าเลือกผลิตภัณฑ์ที่ดีที่สุด. เราใส่ใจเกี่ยวกับธุรกิจและความต้องการส่วนบุคคลของคุณ. ติดต่อได้แล้ววันนี้.




รายการ NO.:
CT200สั่งซื้อ (ขั้นต่ำ):
10พิมพ์ :
AC Driveโหมดควบคุม :
VF or SVC controlจัดอันดับอำนาจ :
0.75kw to 1250kwความถี่เอาท์พุท :
0-600Hzแรงม้า :
1hp - 1700hpการควบคุมเวกเตอร์ลูปเปิดประสิทธิภาพสูง VFD ct200
open loop vector ควบคุม vfd คุณสมบัติ
open loop vector ควบคุม vfd พารามิเตอร์ทางเทคนิค:
พารามิเตอร์อินพุตและเอาต์พุต | แรงดันไฟฟ้าขาเข้า | เฟสเดียว 220vac±15%, สามเฟส 380vac±15%, สามเฟส 660vac±15%. | |
ความถี่อินพุต | 50 ~ 60hz ± 5% | ||
แรงดันขาออก | 0 ~ จัดอันดับแรงดันอินพุต | ||
ความถี่เอาท์พุท | 0~600hz | ||
กำลังการผลิตเกินพิกัด | 150% ของกระแสไฟที่กำหนด: 60 วินาที; 180% ของกระแสไฟที่กำหนด: 10 วินาที; 200% ของกระแสไฟที่กำหนด: 1s | ||
คุณสมบัติการควบคุมการวิ่ง | โหมดควบคุม | การควบคุม v/f,การควบคุมเวกเตอร์แบบไม่มีเซ็นเซอร์ 0 (ใช้ได้กับมอเตอร์ซิงโครนัส), การควบคุมเวกเตอร์แบบไม่มีเซ็นเซอร์ 1 (ใช้ได้กับมอเตอร์แบบอะซิงโครนัส) | |
อัตราส่วนความเร็วที่ปรับได้ | มอเตอร์แบบอะซิงโครนัส 1:200(v/f,การควบคุมเวกเตอร์แบบไม่มีเซนเซอร์ 1) มอเตอร์ซิงโครนัส 1: 20 (การควบคุมเวกเตอร์ที่ไร้ความรู้สึก 0) | ||
ความแม่นยำในการควบคุมความเร็ว | ±0.5%(v/f),±0.2%(การควบคุมเวกเตอร์แบบไม่มีเซ็นเซอร์) | ||
ความผันผวนของความเร็ว | ±0.3%(การควบคุมเวกเตอร์แบบไม่มีเซนเซอร์) | ||
การตอบสนองแรงบิด | <20ms (การควบคุมเวกเตอร์แบบไม่มีเซนเซอร์) | ||
ความแม่นยำในการควบคุมแรงบิด | 10% (การควบคุมเวกเตอร์แบบไม่มีเซ็นเซอร์) | ||
แรงบิดเริ่มต้น | มอเตอร์แบบอะซิงโครนัส:0.25hz/150%(การควบคุมเวกเตอร์แบบไม่มีเซนเซอร์ 1) มอเตอร์แบบซิงโครนัส:2.5hz/150%(การควบคุมเวกเตอร์แบบไร้ความรู้สึก 0) | ||
ฟังก์ชั่นพื้นฐาน | ความถี่เริ่มต้น | 0.00~10.00hz | |
เวลาตามและธันวาคม | 0.1~3000.0s | ||
ความถี่พาหะ | 1.0khz~16.0khz | ||
การตั้งค่าความถี่ | การตั้งค่าขึ้น/ลง,การตั้งค่าดิจิทัล,การตั้งค่าปริมาณอนาล็อก,การตั้งค่าความถี่พัลส์,การตั้งค่าความเร็วหลายขั้นตอน,การตั้งค่าPID,การตั้งค่าการสื่อสารmodbus,การตั้งค่าการสื่อสารprofibus,เป็นต้น . | ||
โหมดเริ่มต้น | เริ่มต้นด้วยความถี่เริ่มต้น,สตาร์ทหลังจากเบรกดีซี,เริ่มติดตามความเร็ว | ||
โหมดหยุด | ตัวหยุดลดความเร็ว,หยุดฟรี,ตัวหยุดลดความเร็วด้วยเบรกดีซีหรือเบรกฟลักซ์แม่เหล็ก | ||
ประเภทมอเตอร์ | มอเตอร์อะซิงโครนัส,มอเตอร์ซิงโครนัสแม่เหล็กถาวร | ||
กำลังเบรกพลังงาน | แรงดันใช้งานของชุดเบรก: 320~750V | ||
ความสามารถในการเบรก DC | ความถี่เบรกกระแสตรง: 0 ~ 300hz; เวลารอการเบรก dc: 0 ~ 50s; กระแสไฟเบรกดีซี: 0.0~100.0%; เวลาเบรก DC: 0.0~50.0s; | ||
การปรับแรงดันไฟฟ้าอัตโนมัติ | รักษาแรงดันไฟขาออกที่เสถียรโดยอัตโนมัติเมื่อแรงดันไฟกริดไม่คงที่ | ||
ความถี่ลดลงทันที | ลดความถี่ในทันทีเพื่อให้แรงดันไฟบัสคงที่เมื่อแรงดันไฟฟ้ากริดมีแรงดันไฟต่ำ. | ||
ขั้วควบคุม | อินพุตดิจิตอล | อินพุต 10 ช่องสัญญาณมาตรฐาน, หนึ่งในนั้นสามารถเป็นอินพุตพัลส์ความเร็วสูง (hdi) | |
อินพุตแบบอะนาล็อก | อินพุต 3 ช่องมาตรฐาน , AI1: 0 ~ 10V หรือ 0 ~ 20ma อินพุตเสริม , AI2: 0 ~ 10V หรือ 0 ~ 20ma อินพุตเสริม , ai3: -10V ~ + 10V อินพุต . | ||
เอาต์พุตดิจิตอล | เอาต์พุตตัวรวบรวมมัลติฟังก์ชั่นมาตรฐาน 2 ช่องสัญญาณ, หนึ่งในนั้นสามารถเอาต์พุตพัลส์ความเร็วสูง (hdo). | ||
เอาต์พุตแบบอะนาล็อก | เอาต์พุต 2 ช่องสัญญาณมาตรฐาน AO1, AO2 (ตัวเลือก 0 ~ 10V หรือ 4 ~ 20ma) | ||
เอาท์พุทรีเลย์ | เอาต์พุตรีเลย์ 2 ช่องสัญญาณมาตรฐาน | ||
อินเทอร์เฟซการสื่อสาร | การสื่อสาร rs485 | อินเทอร์เฟซการสื่อสาร rs485 สำหรับการสื่อสาร RS485 ภายนอก, โปรโตคอล modbus (โหมด RTU) | |
พอร์ตการสื่อสารแบบขยาย | พอร์ตการสื่อสารต่างๆสำหรับการขยาย | รองรับ profibus,canopen,การสื่อสารผ่านอีเทอร์เน็ต. | |
ป้องกันความผิดพลาด | กระแสเกิน ACC, กระแสเกิน DEC, กระแสเกินความเร็วคงที่, แรงดันไฟเกิน ACC, แรงดันไฟเกิน DEC, แรงดันไฟเกินที่ความเร็วคงที่, บัสบาร์ภายใต้แรงดันไฟฟ้า, มอเตอร์โอเวอร์โหลด, อินเวอร์เตอร์โอเวอร์โหลด, กำลังไฟฟ้าเข้า ความล้มเหลว, การสูญเสียเฟสเอาต์พุต, โมดูลวงจรเรียงกระแสความร้อนสูงเกินไป, โมดูลอินเวอร์เตอร์ร้อนเกินไป, ความผิดปกติภายนอก, ความผิดปกติในการสื่อสาร, ข้อผิดพลาดในการตรวจจับกระแสไฟ, เป็นต้น. | ||
จอแสดงผลปุ่มกด | นำจอแสดงผล | ไฮไลท์หลอดดิจิตอล LED แสดงข้อมูลอินเวอร์เตอร์. | |
จอlcd | จอแอลซีดีแสดงข้อมูลอินเวอร์เตอร์. | ||
คนอื่น | สภาพแวดล้อมการวิ่ง | ภายในอาคาร, เหนือระดับน้ำทะเลน้อยกว่า 1 กิโลเมตร, ไม่มีฝุ่น, ก๊าซกัดกร่อนหรือแสงแดดโดยตรง | |
อุณหภูมิโดยรอบ | -10~+40℃, ลดอัตรา 1% สำหรับทุก ๆ 1 ℃ เมื่ออุณหภูมิแวดล้อมอยู่ระหว่าง 40~50℃ | ||
ความชื้น | 5~95% (ไม่มีการควบแน่น) | ||
ความสูง | 0~2000m, ลดอัตรา 1% สำหรับทุก ๆ 100m เพิ่มเติมเมื่อระดับน้ำทะเลสูงกว่า 1,000m | ||
การสั่นสะเทือน | น้อยกว่า 0.5g | ||
อุณหภูมิในการจัดเก็บ | −40~+70℃ | ||
open loop vector ควบคุม vfd ตารางรุ่น
รุ่นอินเวอร์เตอร์ | กำลัง (กิโลวัตต์) | กระแสไฟเข้า (a) | กระแสไฟขาออก (a) | กำลังมอเตอร์ที่ใช้บังคับ (กิโลวัตต์) |
เฟสเดียว 220vac 50/60hz | ||||
ct200-2s-0.7-b | 0.7 | 8.2 | 4.0 | 0.75 |
ct200-2s-1.5-b | 1.5 | 14.0 | 7.0 | 1.5 |
ct200-2s-2.2-b | 2.2 | 23.0 | 9.6 | 2.2 |
สามเฟส 380vac 50/60hz | ||||
ct200-4t-0.7-b | 0.7 | 3.4 | 2.5 | 0.7 |
ct200-4t-1.5-b | 1.5 | 5.0 | 3.7 | 1.5 |
ct200-4t-2.2-b | 2.2 | 5.8 | 5.3 | 2.2 |
ct200-4t-4.0-b | 4.0 | 12.0 | 9.5 | 4.0 |
ct200-4t-5.5-b | 5.5 | 18.5 | 14 | 5.5 |
ct200-4t-7.5-b | 7.5 | 22.5 | 18.5 | 7.5 |
ct200-4t-11-b | 11 | 30.0 | 25.0 | 11 |
ct200-4t-15-b | 15 | 39.0 | 32.0 | 15 |
ct200-4t-18.5-b | 18.5 | 45.0 | 38.0 | 18.5 |
ct200-4t-22-b | 22 | 54.0 | 45.0 | 22 |
ct200-4t-30-b | 30 | 68.0 | 60.0 | 30 |
ct200-4t-37-b | 37 | 84.0 | 75.0 | 37 |
ct200-4t-45 | 45 | 98.0 | 92.0 | 45 |
ct200-4t-55 | 55 | 123.0 | 115.0 | 55 |
ct200-4t-75 | 75 | 157.0 | 150.0 | 75 |
ct200-4t-90 | 90 | 188.0 | 180.0 | 90 |
ct200-4t-110 | 110 | 221.0 | 215.0 | 110 |
ct200-4t-132 | 132 | 267.0 | 260.0 | 132 |
ct200-4t-160 | 160 | 309.0 | 305.0 | 160 |
ct200-4t-185 | 185 | 344.0 | 340.0 | 185 |
ct200-4t-200 | 200 | 384.0 | 380.0 | 200 |
ct200-4t-220 | 220 | 429.0 | 425.0 | 220 |
ct200-4t-250 | 250 | 484.0 | 480.0 | 250 |
ct200-4t-280 | 280 | 539.0 | 530.0 | 280 |
ct200-4t-315 | 315 | 612.0 | 600.0 | 315 |
ct200-4t-350 | 350 | 665.0 | 650.0 | 350 |
ct200-4t-400 | 400 | 715.0 | 720.0 | 400 |
ct200-4t-500 | 500 | 890.0 | 860.0 | 500 |
open loop vector ควบคุม vfd แอปพลิเคชัน:


CT300 series close loop vector inverter VFD, ที่ใช้ระบบควบคุม DSP, มีเทคโนโลยีการควบคุมเวกเตอร์ที่มีประสิทธิภาพสูงซึ่งมีประสิทธิภาพสูงในการควบคุมความเร็วและแรงบิดซึ่งส่วนใหญ่ใช้สำหรับเครื่องมือกล, สิ่งทอ, และอุตสาหกรรมหลักอื่นๆ, บรรลุประสิทธิภาพที่ยอดเยี่ยมและความน่าเชื่อถือสูง.

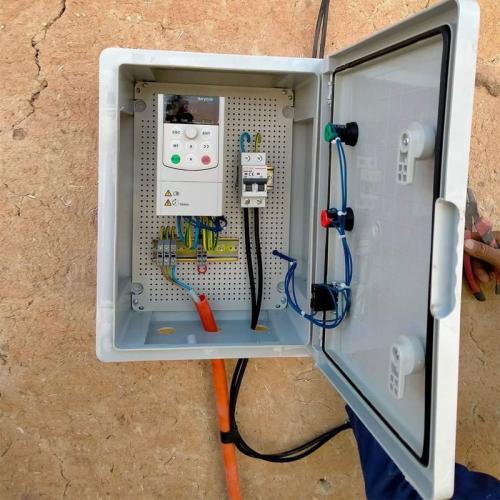
อินเวอร์เตอร์ปั๊มพลังงานแสงอาทิตย์ซีรีส์ CT112S ที่ใช้ในระบบปั๊มพลังงานแสงอาทิตย์สามารถแปลงพลังงาน DC จากอาร์เรย์ PV พลังงานแสงอาทิตย์เป็นไฟ AC เพื่อขับเคลื่อนมอเตอร์ปั๊ม อินเวอร์เตอร์ควบคุมการทำงานของระบบและปรับความถี่เอาต์พุตแบบเรียลไทม์ตามการเปลี่ยนแปลงของความเข้มของแสงแดดเพื่อให้ทราบถึงการติดตามจุดกำลังสูงสุด (MPPT)

ซีรี่ส์ CT100 VFD อเนกประสงค์ ระบบควบคุม DSP นี้ใช้เทคโนโลยีการควบคุมเวกเตอร์แบบวงเปิดประสิทธิภาพสูง ทำให้ได้ประสิทธิภาพที่ยอดเยี่ยมและความน่าเชื่อถือสูง สามารถนำไปใช้กับมอเตอร์อะซิงโครนัสเพื่อให้ได้ประสิทธิภาพการขับเคลื่อนที่ยอดเยี่ยม บริษัท เซินเจิ้น โดลีคอน เทคโนโลยี จำกัด บริษัทของเราก่อตั้งขึ้นในปี 2015 โดยมุ่งเน้นการวิจัย พัฒนา และจำหน่ายผลิตภัณฑ์ ตัวขับความถี่แปรผัน และ อินเวอร์เตอร์ปั๊มน้ำพลังงานแสงอาทิตย์ เป็นเวลากว่า 7 ปีแล้วที่เราเป็นผู้ผลิตอุปกรณ์ควบคุมความถี่แปรผันและอินเวอร์เตอร์ปั๊มน้ำพลังงานแสงอาทิตย์ระดับมืออาชีพและใช้เทคโนโลยีขั้นสูงระดับประเทศ
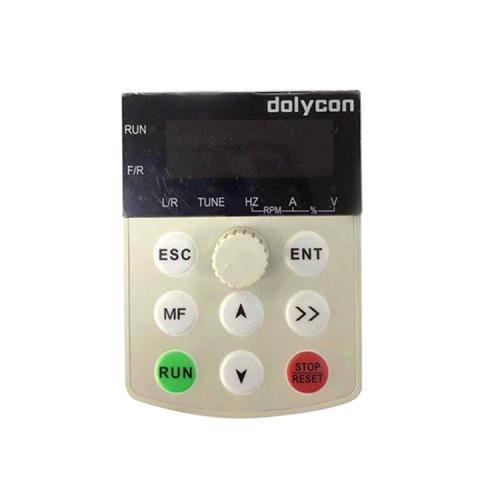
แผงปุ่มกดแผงควบคุมพร้อมจอ LCD สำหรับใช้งาน VFD ในพื้นที่หรือระยะไกล.

ซีรี่ส์ CT112 อินเวอร์เตอร์ปั๊มน้ำพลังงานแสงอาทิตย์ อินเวอร์เตอร์ที่ใช้ในระบบปั๊มน้ำพลังงานแสงอาทิตย์สามารถแปลงไฟกระแสตรง (DC) จากแผงโซลาร์เซลล์เป็นไฟกระแสสลับ (AC) เพื่อขับเคลื่อนมอเตอร์ปั๊ม อินเวอร์เตอร์จะควบคุมการทำงานของระบบและปรับความถี่เอาต์พุตแบบเรียลไทม์ตามการเปลี่ยนแปลงของความเข้มแสงแดด เพื่อให้สามารถติดตามจุดกำลังสูงสุด (MPPT) ได้
CT112M mini series อินเวอร์เตอร์ปั๊มพลังงานแสงอาทิตย์เป็นอินเวอร์เตอร์ขนาดเล็กแปลงแผงเซลล์แสงอาทิตย์ dc เป็นไฟ ac , พิเศษสำหรับ AM หรือ PMSM การควบคุมปั๊มพลังงานแสงอาทิตย์.

ซีที112เอ อินเวอร์เตอร์ปั๊มน้ำพลังงานแสงอาทิตย์ ใช้พื้นฐานจากอินเวอร์เตอร์ปั๊มน้ำพลังงานแสงอาทิตย์ CT112 และติดตั้งฟังก์ชันเพิ่มแรงดันไฟฟ้าอัตโนมัติ เพื่อตอบสนองความต้องการในการทำงานที่แรงดันไฟฟ้าต่ำ และลดความซับซ้อนในการกำหนดค่าแผงแบตเตอรี่พลังงานแสงอาทิตย์ ซึ่งช่วยลดต้นทุนของระบบ

เครื่องแปลงความถี่ CT210 ผสานรวมตรรกะการควบคุมพิเศษของเครื่องตัดแบบหมุนเข้าไว้ในตัว และมีการควบคุมแบบครบวงจรสำหรับการตัดแบบหมุน การผ่า และการร้อยไม้ ใช้สำหรับการตัดไม้แบบหมุน ซึ่งมีข้อดีคือความหนาสม่ำเสมอและแม่นยำ การควบคุมปลายไม้ที่แม่นยำ เป็นต้น


 รองรับเครือข่าย ipv6
รองรับเครือข่าย ipv6


 ไทย
ไทย English
English فارسی
فارسی français
français русский
русский español
español português
português العربية
العربية Türkçe
Türkçe Tiếng Việt
Tiếng Việt



